How to Solve Multi Input Multi Output Control Problems Using MATLAB
Multi-Input Multi-Output (MIMO) control systems are a crucial component in modern engineering, particularly in fields like aerospace, robotics, automotive, and telecommunications. These systems involve multiple inputs and outputs, where the control system must simultaneously manage several variables or processes to achieve a desired outcome. In contrast to Single-Input Single-Output (SISO) systems, MIMO systems are inherently more complex due to the interactions between multiple variables. Solving MIMO control problems can be quite challenging, but using MATLAB, a powerful tool for numerical computing, can significantly ease the process. For students seeking assistance with their Control Systems assignment, MATLAB proves to be an invaluable resource.
MATLAB provides an extensive set of tools for modeling, analyzing, and designing control systems. It is particularly well-suited for MIMO systems, thanks to its rich library of functions that support matrix operations, linear and nonlinear modeling, and advanced control design techniques like state-space methods, pole-placement, and optimal control. In this blog, we will explore the steps involved in solving MIMO control problems using MATLAB, from modeling the system to designing and implementing control strategies. If you need further assistance, consider seeking MATLAB assignment help to guide you through complex tasks and improve your understanding of these concepts.

Understanding MIMO Control Systems
Before diving into MATLAB, it is essential to understand the fundamentals of MIMO control systems. These systems have more than one input and more than one output, meaning multiple control signals must be used to manage multiple processes. For example, in a drone, the inputs might be the throttle, pitch, and yaw control signals, while the outputs could include altitude, position, and orientation.
In MIMO control, interactions between the various inputs and outputs must be considered. For instance, adjusting one input might affect multiple outputs. This interdependency makes MIMO systems more challenging to design and control effectively compared to simpler systems.
MATLAB for MIMO Systems
MATLAB offers a comprehensive environment to model and solve MIMO control problems. Using the Control System Toolbox, students can work with state-space models, transfer functions, and frequency domain representations of MIMO systems. MATLAB also supports advanced simulation techniques such as time-domain and frequency-domain analysis, providing a clear visualization of the system’s response.
Steps to Solve MIMO Control Problems Using MATLAB
In MATLAB, solving MIMO control problems typically involves several key steps:
- Model the System: The first step is to model the MIMO system using state-space or transfer function representations. MATLAB provides functions like ss() for state-space models and tf() for transfer functions.
- Analyze the System: Once the system is modeled, analyze its stability and performance. MATLAB offers various tools like bode(), nyquist(), and step() for this purpose.
- Design the Controller: After analyzing the system, the next step is to design the controller. This can involve methods like Linear Quadratic Regulator (LQR), pole placement, or optimal control.
- Simulate the System: Finally, simulate the system’s behavior with the designed controller. MATLAB’s sim() function can be used to simulate the time response, providing a detailed view of how the system will behave under various conditions.
By following these steps and utilizing MATLAB’s powerful tools, students can effectively solve MIMO control problems and gain valuable insights into system behavior and controller design.
Modeling MIMO Systems in MATLAB
Modeling MIMO systems in MATLAB involves creating accurate representations of the system's dynamics using either state-space or transfer function models. The state-space method uses matrices to describe the system's internal states, inputs, and outputs, while the transfer function approach focuses on the input-output relationship in the Laplace domain. Both methods are crucial for simulating and analyzing complex MIMO systems, allowing students to understand system behavior and performance. MATLAB’s functions like ss() for state-space and tf() for transfer functions simplify this process, enabling efficient system modeling and providing a foundation for further control design and analysis.
State-Space Representation
In MATLAB, one of the primary methods for modeling a MIMO system is through the state-space representation. A MIMO system can be described by a set of linear differential equations that relate the inputs and outputs to the system’s internal states. In matrix form, the state-space representation is given by:
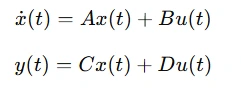
Where:
- x(t) is the state vector,
- u(t) is the input vector,
- y(t) is the output vector,
- A, B, C, and D are matrices that define the system’s dynamics.
In MATLAB, the state-space model can be created using the ss() function:
A = [0 1; -2 -3]; % Example system matrices
B = [0; 1];
C = [1 0];
D = [0];
sys = ss(A, B, C, D); % Create the state-space system
This model represents a simple MIMO system with two states and one input/output. For more complex systems, the matrices will be larger, and the system’s behavior may require more advanced techniques to analyze.
Transfer Function Representation
An alternative method for modeling MIMO systems is through transfer functions, which describe the relationship between the input and output in the Laplace domain. For MIMO systems, the transfer function is represented as a matrix where each element corresponds to a transfer function between a particular input and output.
In MATLAB, the transfer function can be created using the tf() function:
G11 = tf([1], [1 2 1]); % Transfer function for input 1 to output 1
G12 = tf([1], [1 3 1]); % Transfer function for input 1 to output 2
G21 = tf([2], [1 2 1]); % Transfer function for input 2 to output 1
G22 = tf([1], [1 1 1]); % Transfer function for input 2 to output 2
sys = [G11 G12; G21 G22]; % Create MIMO transfer function matrix
This code creates a 2x2 MIMO transfer function matrix with each element representing the transfer function from an input to an output.
Simulating MIMO Systems
Once a system is modeled, MATLAB allows students to simulate the system's response to various inputs. For state-space systems, the lsim() function is commonly used:
t = 0:0.1:10; % Time vector
u = [sin(t); cos(t)]; % Example input
[y, t] = lsim(sys, u, t); % Simulate system response
plot(t, y); % Plot the output
This function simulates the time-domain response of the system to the given input uuu. It’s a valuable tool for visualizing how the system behaves over time and whether the desired performance is achieved.
Controller Design for MIMO Systems
Controller design for MIMO systems involves developing control strategies that manage multiple inputs and outputs simultaneously. Techniques such as Linear Quadratic Regulator (LQR) and pole placement are commonly used for this purpose. LQR minimizes a cost function that balances state error and control effort, providing an optimal control law. Pole placement, on the other hand, assigns desired pole locations to achieve specific stability and performance goals. MATLAB simplifies these tasks with built-in functions like lqr() and place(), enabling students to design effective controllers by computing gain matrices and ensuring the system meets the desired behavior.
Linear Quadratic Regulator (LQR) for MIMO Systems
One of the most popular methods for designing controllers in MIMO systems is the Linear Quadratic Regulator (LQR). LQR is an optimal control technique that minimizes a cost function involving the system states and control inputs. The cost function is typically given by:
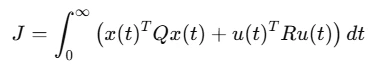
Where Q and R are weighting matrices that define the trade-off between state error and control effort. The LQR controller is designed to minimize this cost function, resulting in an optimal control law.
In MATLAB, the lqr() function can be used to compute the LQR gain matrix:
Q = eye(2); % State weighting matrix
R = 1; % Control effort weighting
K = lqr(sys, Q, R); % Compute the LQR gain matrix
This function returns the gain matrix KKK, which can then be used to compute the control input u(t) for the system.
Pole-Placement for MIMO Systems
Another method for controller design is pole placement, where the poles of the system are assigned to desired locations to achieve the desired stability and performance. For MIMO systems, this can be more complex, but MATLAB provides tools to compute the required state feedback gain matrices.
desired_poles = [-2 -3]; % Desired pole locations
K = place(sys.A, sys.B, desired_poles); % Compute the state feedback gain matrix
This will give the feedback gains that ensure the system’s poles are placed at the specified locations, achieving the desired dynamic behavior.
Conclusion
In conclusion, solving MIMO control problems using MATLAB is a structured approach that encompasses modeling, analyzing, controller design, and simulation. MATLAB’s robust set of tools, such as state-space modeling, transfer function analysis, and various controller design methods, enable students to efficiently work with complex MIMO systems. These tools simplify the process of understanding system dynamics, optimizing controller performance, and simulating real-world behavior. By following the outlined steps, students can develop a clear understanding of how to tackle MIMO control problems, enhancing their skills in control theory and system design. The combination of theory and MATLAB’s practical capabilities allows students to bridge the gap between academic concepts and real-world applications, making it an essential resource for solving MIMO control problems in a comprehensive and efficient manner. With consistent practice and application of these techniques, students can confidently approach and resolve MIMO control challenges in their assignments and projects.